俇丏僒乕儃儌乕僞乕俽俧俋俀俼偺幚尡
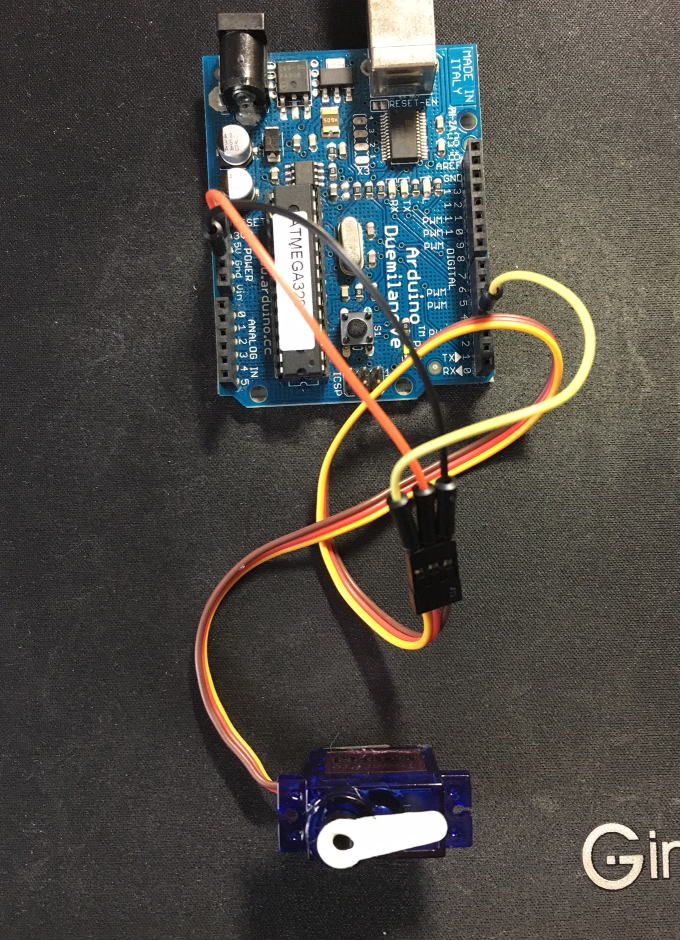
乮侾乯幚尡幨恀
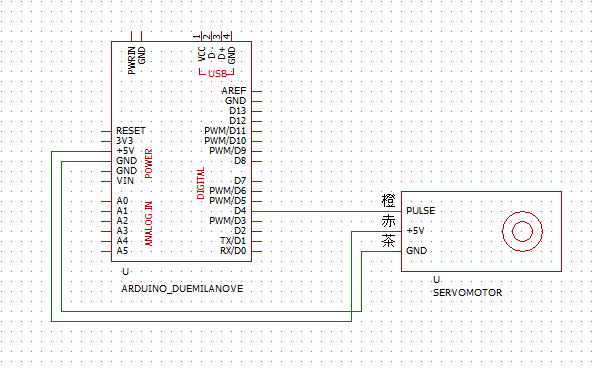
乮俀乯夞楬恾
![]()
俇丏僒乕儃儌乕僞乕俽俧俋俀俼偺幚尡
乮侾乯幚尡幨恀
乮俀乯夞楬恾
乮俁乯僒乕儃儌乕僞乕俽俧俋俀俼 巇條
丂庡側巇條乮廐寧HP傛傝乯
丂丂丒俹倂俵僒僀僋儖丗俀侽倣俽
丂丂丒惂屼僷儖僗丗侽丏俆倣倱乣俀丏係倣倱
丂丂丒惂屼妏丗亇栺俋侽亱乮侾俉侽亱乯
丂丂丒攝慄丗拑亖俧俶俢丄愒亖揹尮乵亄乶丄烌亖惂屼怣崋丂乵俰俼僞僀僾乶
丂丂丒僩儖僋丗俀丏俆倠倗倖丒們倣
丂丂丒摦嶌懍搙丗侽丏侾昩乛俇侽搙
丂丂丒摦嶌揹埑丗係丏俉倁乮乣俇倁乯
丂丂丒壏搙斖埻丗侽亷乣俆俆亷
丂丂丒奜宍悺朄丗俀俁倶侾俀丏俀倶俀俈倣倣
丂丂丒廳検丗俋倗
乮係乯僗働僢僠
乮係亅侾乯僒乕儃偺妏搙傪侽搙乣侾俉侽搙孞傝曉偟
/*
栚揑丗僒乕儃偺妏搙傪侽搙偐傜侾俉侽搙傊扨弮偵曄峏
http://www.isopro91.com
2015/6/3
*/
#include<Servo.h>
Servo servo1;
void setup() {
servo1.attach(4);
}
void loop() {
servo1.write(0);
delay(1000);
servo1.write(180);
delay(1000);
}
乮係亅俀乯侽搙乣侾俉侽搙傑偱侾侽搙偛偲憹偊偰偄偔
/*
栚揑丗僒乕儃偺妏搙傪侽搙偐傜侾俉侽搙傊扨弮偵曄峏
http://www.isopro91.com
2015/6/3
*/
#include<Servo.h>
Servo servo1;
void setup() {
servo1.attach(4);
Serial.begin(9600); // 9600bps偱億乕僩傪奐偔
}
void loop() {
for(int i=0;i<=18;i++){
servo1.write(i*10);
Serial.println(servo1.read());
if(i==0){delay(800);}
delay(200);
}
}
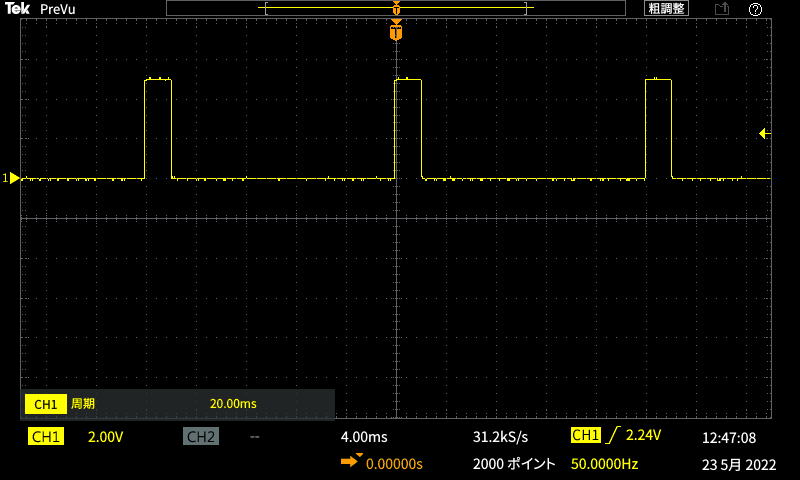
乮俆乯僆僔儘僗僐乕僾攇宍
丂丂丂俠俫侾丂丂俢係
乮俇乯摦夋乮MOV乯
丂丂IMG_5877.MOV