4.Arduino+ステッピングモーターPM15S-020の実験
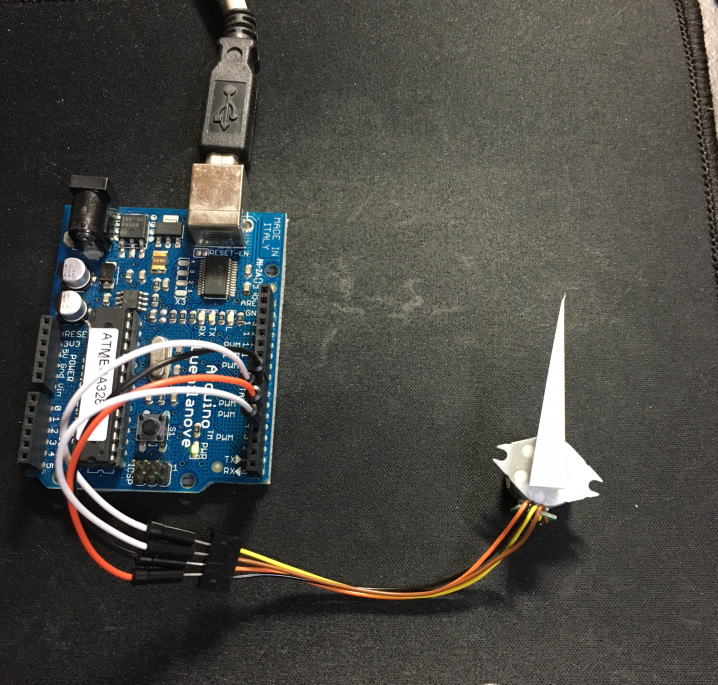
(1)実験写真
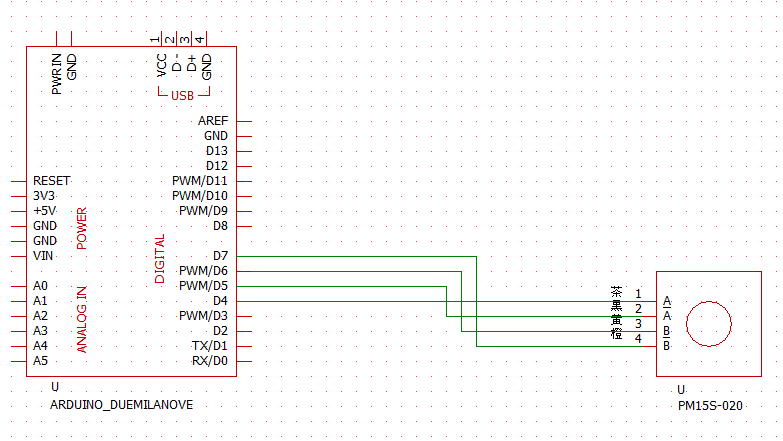
(2)回路図
![]()
4.Arduino+ステッピングモーターPM15S-020の実験
(1)実験写真
(2)回路図
(3)スケッチ
(3−1)右回転のみ
int t=10;
void setup() {
pinMode(4, OUTPUT); // 出力に設定
pinMode(5, OUTPUT); // 出力に設定
pinMode(6, OUTPUT); // 出力に設定
pinMode(7, OUTPUT); // 出力に設定
}
void loop() {
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
delay(t);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(t);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(t);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
delay(t);
}
(3−2) 右回転〜左回転 繰り返し
int t=10;
void setup() {
pinMode(4, OUTPUT); // 出力に設定
pinMode(5, OUTPUT); // 出力に設定
pinMode(6, OUTPUT); // 出力に設定
pinMode(7, OUTPUT); // 出力に設定
}
void loop() {
for(int i=0;i<20;i++)
{
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
delay(t);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(t);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(t);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
delay(t);
}
delay(1000);
for(int i=0;i<20;i++)
{
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
delay(t);
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(t);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(t);
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,LOW);
digitalWrite(7,HIGH);
delay(t);
}
delay(1000);
}
(4)動画(MOV)
IMG_5875.MOV
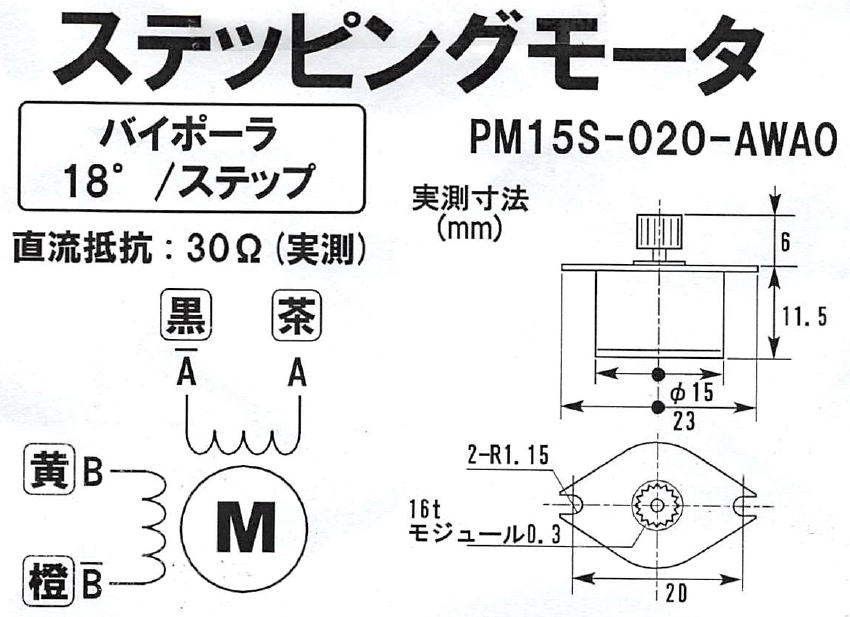
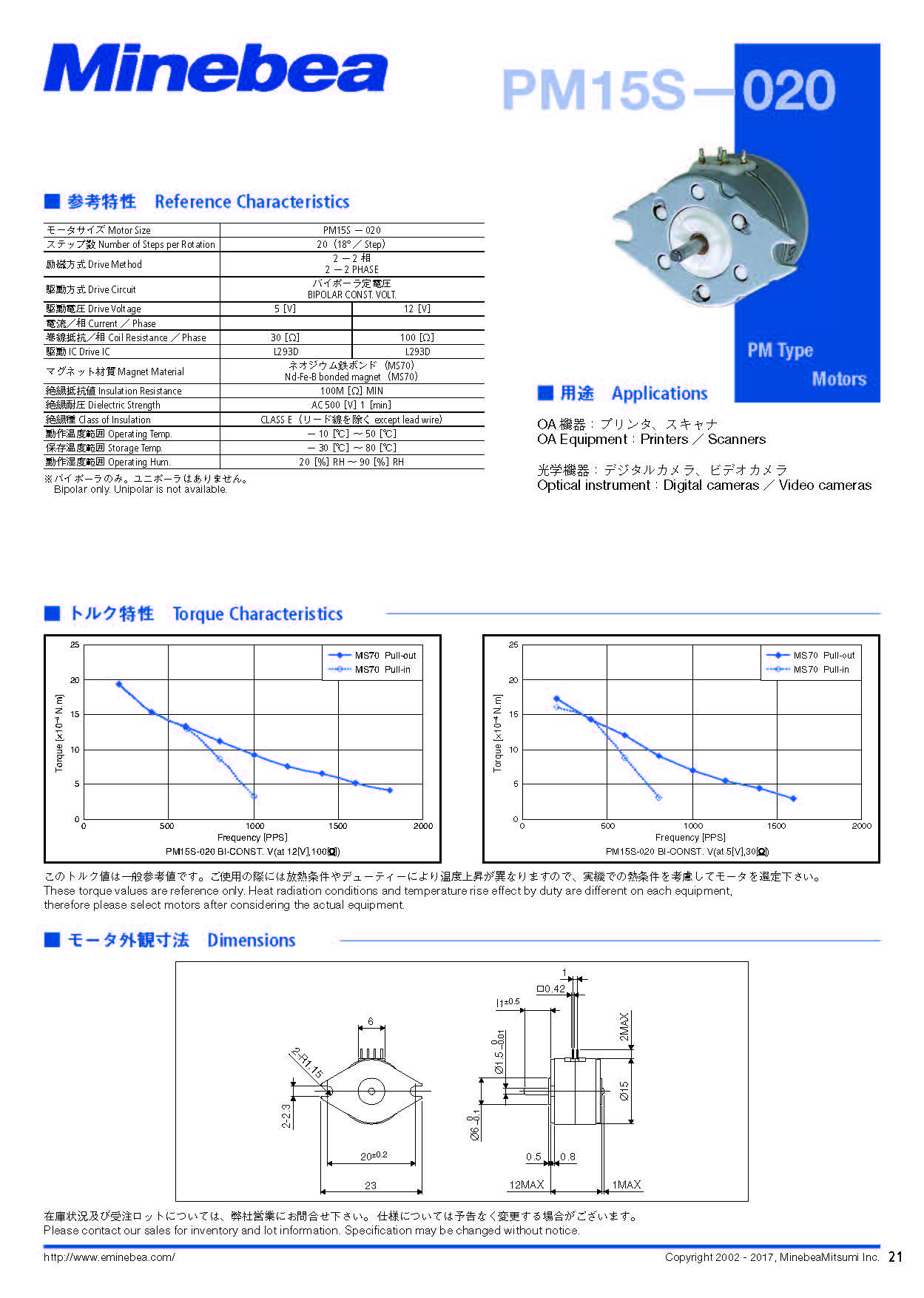
(5)ステッピングモーターPM15S-020仕様書